1.3. 线性变换及其表示¶
1.3.1. 线性变换¶
什么是线性变换¶
设\({\mathbb V}\)是数域\(\mathbb K\)上的线性空间, \(T\)是\({\mathbb V}\)到自身的一个映射, 使得对于 \(\forall {\bm x} \in {\mathbb V}\), \({\mathbb V}\)中都有唯一的向量\(\bm y\)与之对应, 则称 \(T\) 是\({\mathbb V}\)的一个 变换 或 算子 , 记为
称\({\bm y}\)为\({\bm x}\)在\(T\)下的象, \({\bm x}\) 为 \({\bm y}\) 的原象.
警告
\(T\)是\({\mathbb V}\)到自身的一个映射: 即变换前后都在线性空间\({\mathbb V}\)中, 如果变换前后不在同一线性空间中?.
定义中说明了\({\mathbb V}\)中的元素为向量, 实际上\({\mathbb V}\)中元素不一定是向量.
设\(T\)是数域\(K\)上线性空间\({\mathbb V}\)中的一个变换, 对于\(\forall k, l\in K\), 若满足
则称\(T\)是\({\mathbb V}\)的线性变换.
线性变换的特性¶
若线性空间 \({\mathbb V}\) 中的 \({\bm x}_1, {\bm x}_2, \cdots, {\bm x}_m\) 线性相关, 则线性变换 \(T\) 对其变换后仍线性相关.
即若存在不全为零的数 \(c_1, c_2, \cdots, c_m \in K\) , 使得
成立, 则亦有下式成立
1.3.2. 线性变换的运算¶
涉线性变换的加法, 数乘, 乘法, 逆与幂, 以及单位变换, 零变换, 负变换, 逆变换, 多项式. 有关对称变换, 正交变换, 酉变换参见 特殊线性空间 小节
提示
可以证明上述变换均为线性变换!
基本线性变换¶
单位变换¶
将线性空间 \({\mathbb V}\) 中的任一元素 \({\bm x}\) 变为自身的变换称为 单位变换 , 即
零变换¶
将线性空间 \({\mathbb V}\) 中的任一元素 \({\bm x}\) 变为零元素 \({\bm 0}\) 的变换称为 零变换 , 即
负变换¶
设 \(T\) 是线性空间 \({\mathbb V}\) 的线性变换, 线性变换 \(T\) 的 负变换 定义为
逆变换¶
设 \(T, T^{-1}\) 是线性空间 \({\mathbb V}\) 的线性变换, 若满足下述条件, 则称线性变换 \(T\) 与 \(T^{-1}\) 互为 逆变换 (Inverse transformation) , 即
亦即:
加法¶
定义¶
设 \(T_1, T_2\) 是线性空间 \({\mathbb V}\) 的两个线性变换, 线性变换的 加法 定义为
性质¶
交换律: \(T_1 + T_2 = T_2 + T_1\)
结合律: \((T_1 + T_2) + T_3 = T_1 + (T_2 + T_3)\)
有零元: \(T + T_0 = T\)
有负元: \(T + (-T) = T_0\)
提示
对照线性空间定义中的加法的性质.
数乘¶
定义¶
设 \(k \in K\) , \(T\) 为线性空间 \({\mathbb V}\) 的线性变换, 定义数 \(k\) 与变换 \(T\) 的乘积( 数乘 ) \(kT\) 为
性质¶
乘1律: \(1T = T\)
数因子分配律: \(k(T_1 + T_2) = kT_1 + kT_2\)
数乘分配率: \((k + l)T = kT + lT\)
数乘结合率: \((kl)T = k(lT)\)
提示
对照线性空间定义中的数乘的性质.
乘法¶
定义¶
设 \(T_1, T_2\) 是线性空间 \({\mathbb V}\) 的两个线性变换, 定义 \(T_1\) 与 \(T_2\) 的 乘积 \(T_1T_2\) 为
性质¶
结合律: \((T_1T_2)T_3 = T_1(T_2T_3)\)
分配律1: \(T_1(T_2 + T_3) = T_1T_2 + T_1T_3\)
分配率2: \((T_1 + T_2)T_3 = T_1T_3 + T_2T_3\)
幂¶
定义¶
设 \(n\) 是正整数, \(T\) 是线性空间 \({\mathbb V}\) 中的线性变换, 定义其 \(n\) 次幂 为
定义 \(T\) 的 零次幂 为:
性质¶
性质1: \(T^{m+n} = T^m T^n\)
性质2: \((T^m)^n = T^{mn}\)
性质3: \(T^{(-n)} = (T^{-1})^n\)
线性变换的多项式¶
定义¶
数量 \(t\) 的 \(m\) 次多项式可以定义为
类似地, 线性变换 \(T\) 的 \(m\) 次多项式可以定义为
性质¶
性质1: 若 \(h(t) = f(t)g(t)\) , 则 \(h(T) = f(T)g(T)\)
性质2: 若 \(p(t) = f(t) + g(t)\) , 则 \(p(T) = f(T) + g(T)\)
性质3: \(f(T)g(T) = g(T)f(T)\) (同一线性变换的多项式相乘可交换)
1.3.3. 线性变换与矩阵¶
线性变换的矩阵表示¶
设 \(T\) 是线性空间 \({\mathbb V}\) 中的线性变换, \({\bm x} \in {\mathbb V}^n\) , 且 \({\bm x}_1 , {\bm x}_2 , \cdots, {\bm x}_n\) 是 \({\mathbb V}^n\) 的一个基 (原象基组), 则
故 \({\bm x}\) 在变换 \(T\) 下得到的象 \(T{\bm X}\) 可以由基象组线性表示, 而基像组仍在线性空间 \({\mathbb V}\) 中, 故可用原象组线性表示为
将上述方程组矩阵化可得, 线性变换 \(T\) 在基 \({\bm x}_1 , {\bm x}_2 , \cdots, {\bm x}_n\) 下的矩阵表示为
其中
矩阵 \({\bm A}\) 的第 \(i\) 列为 \(T{\bm x}_i\) 的坐标. 当 \(\oplus\) 表示普通向量加法, \(\odot\) 表示普通数与向量乘法时, 上式退化为普通矩阵乘.
注解
举个例子, 定义线性空间 \({\mathbb R}^{2\times 2}\) 中的线性变换
求线性变换 \(T\) 在基 \({\bm E}_{11}, {\bm E}_{12}, {\bm E}_{21}, {\bm E}_{22}\) 下的矩阵.
解: 由题意有
由上式得到 \(T\) 在所给基下的矩阵为
满足 \(T({\bm E}_{11}, {\bm E}_{12}, {\bm E}_{21}, {\bm E}_{22}) = ({\bm E}_{11}, {\bm E}_{12}, {\bm E}_{21}, {\bm E}_{22}) {\bm A}\)
提示
零变换的矩阵为零矩阵: \({\bm O}\)
单位变换的矩阵为单位矩阵: \({\bm I}\)
数乘变换的矩阵为数量矩阵: \(m{\bm I}\)
性质¶
\((T_1 + T_2)({\bm x}_1 , {\bm x}_2 , \cdots, {\bm x}_n) = ({\bm x}_1 , {\bm x}_2 , \cdots, {\bm x}_n)({\bm A}+{\bm B})\)
\((kT_1)({\bm x}_1 , {\bm x}_2 , \cdots, {\bm x}_n) = ({\bm x}_1 , {\bm x}_2 , \cdots, {\bm x}_n)(k{\bm A})\)
\((T_1 T_2)({\bm x}_1 , {\bm x}_2 , \cdots, {\bm x}_n) = ({\bm x}_1 , {\bm x}_2 , \cdots, {\bm x}_n){\bm A}{\bm B}\)
\((T_1^{-1})({\bm x}_1 , {\bm x}_2 , \cdots, {\bm x}_n) = ({\bm x}_1 , {\bm x}_2 , \cdots, {\bm x}_n){\bm A}^{-1}\)
像与原像的坐标转换¶
设有线性空间 \({\mathbb V}^n\) 中的元素 \({\bm x}\) , 线性变换 \(T\) , 一组基 \({\bm x}_1 , {\bm x}_2 , \cdots, {\bm x}_n\) ; \({\bm x}\) 在该基下的坐标为 \((\xi_1, \xi_2, \cdots, \xi_n)^T\) , \(T\) 在该基下的的矩阵为 \({\bm A}\) ; 则 \(T{\bm x}\) 在该基下的坐标为
提示
线性变换在不同基下的矩阵转换¶
设有线性空间 \({\mathbb V}^n\) 中的线性变换 \(T\) , 在基 \({\bm x}_1 , {\bm x}_2 , \cdots, {\bm x}_n\) 和基 \({\bm y}_1 , {\bm y}_2 , \cdots, {\bm y}_n\) 下的矩阵分别为 \({\bm A}, {\bm B}\) , 且由基1到基2的过度矩阵为 \({\bm C}\) , 则有
提示
相似矩阵¶
什么是相似矩阵¶
由线性变换在不同基下的矩阵关系引出矩阵相似定义:
设有矩阵 \({\bm A}, {\bm B}\) , 若存在 非奇异矩阵 \({\bm P}\) 使得 \({\bm B} = {\bm P}^{-1}{\bm A}{\bm P}\) , 则称 \({\bm A}\) 相似于 \({\bm B}\) , 记作 \({\bm A} \sim {\bm B}\) .
警告
矩阵合同是指 \({\bm B} = {\bm P}^{T}{\bm A}{\bm P}\)
若 \({\bm B} = {\bm P}^{-1}{\bm A}{\bm P}\) , 且 \(f(t)\) 是数域 \(K\) 上的多项式, 则有
性质¶
反身性: \(A \sim A\)
对称性: 若 \({\bm A} \sim {\bm B}\) , 则 \({\bm B} \sim {\bm A}\)
传递性: 若 \({\bm A} \sim {\bm B}, {\bm B} \sim {\bm C}\) , 则 \({\bm A} \sim {\bm C}\)
线性变换多项式的矩阵¶
数量 \(t\) 的 \(m\) 次多项式可以定义为
类似地, 线性空间 \({\mathbb V}^n\) 中,线性变换 \(T\) 的 \(m\) 次多项式可以定义为
设线性空间 \({\mathbb V}^n\) 中,线性变换 \(T\) 在基 \({\bm x}_1 , {\bm x}_2 , \cdots, {\bm x}_n\) 下的矩阵为 \({\bm A}\) , 即
则 \(f(T)\) 在该基下的的矩阵 为
上式也称为方阵 \({\bm A}\) 的多项式.
常见线性变换¶
伸缩, 旋转, 对称变换举例
伸缩: \(\left[ {\begin{array}{rrr}k&0\\0&k\end{array}} \right]\left[ {\begin{array}{ccc}{{x_1}}\\{{x_2}}\end{array}} \right] = \left[ {\begin{array}{ccc}{k{x_1}}\\{k{x_2}}\end{array}} \right],\;\;\left[ {\begin{array}{rrr}{{k_1}}&0\\0&{{k_2}}\end{array}} \right]\left[ {\begin{array}{rrr}{{x_1}}\\{{x_2}}\end{array}} \right] = \left[ {\begin{array}{rrr}{{k_1}{x_1}}\\{{k_2}{x_2}}\end{array}} \right]\)
逆时针旋转: \(\left[ {\begin{array}{rrr}{\cos \theta }&{ - \sin \theta }\\{\sin \theta }&{\cos \theta }\end{array}} \right]\left[ {\begin{array}{ccc}{{x_1}}\\{{x_2}}\end{array}} \right] = \left[ {\begin{array}{ccc}{{x_1}\cos \theta - {x_2}\sin \theta }\\{{x_1}\sin \theta + {x_2}\cos \theta }\end{array}} \right]\)
顺时针旋转: \(\left[ {\begin{array}{rrr}{\cos \theta }&{\sin \theta }\\{ - \sin \theta }&{\cos \theta }\end{array}} \right]\left[ {\begin{array}{ccc}{{x_1}}\\{{x_2}}\end{array}} \right] = \left[ {\begin{array}{ccc}{{x_1}\cos \theta + {x_2}\sin \theta }\\{ - {x_1}\sin \theta + {x_2}\cos \theta }\end{array}} \right]\)
轴对称: \(\left[ {\begin{array}{rrr}1&0\\0&{ - 1}\end{array}} \right]\left[ {\begin{array}{ccc}{{x_1}}\\{{x_2}}\end{array}} \right] = \left[ {\begin{array}{ccc}{{x_1}}\\{ - {x_2}}\end{array}} \right],\;\;\left[ {\begin{array}{rrr}{ - 1}&0\\0&1\end{array}} \right]\left[ {\begin{array}{ccc}{{x_1}}\\{{x_2}}\end{array}} \right] = \left[ {\begin{array}{ccc}{ - {x_1}}\\{{x_2}}\end{array}} \right]\)
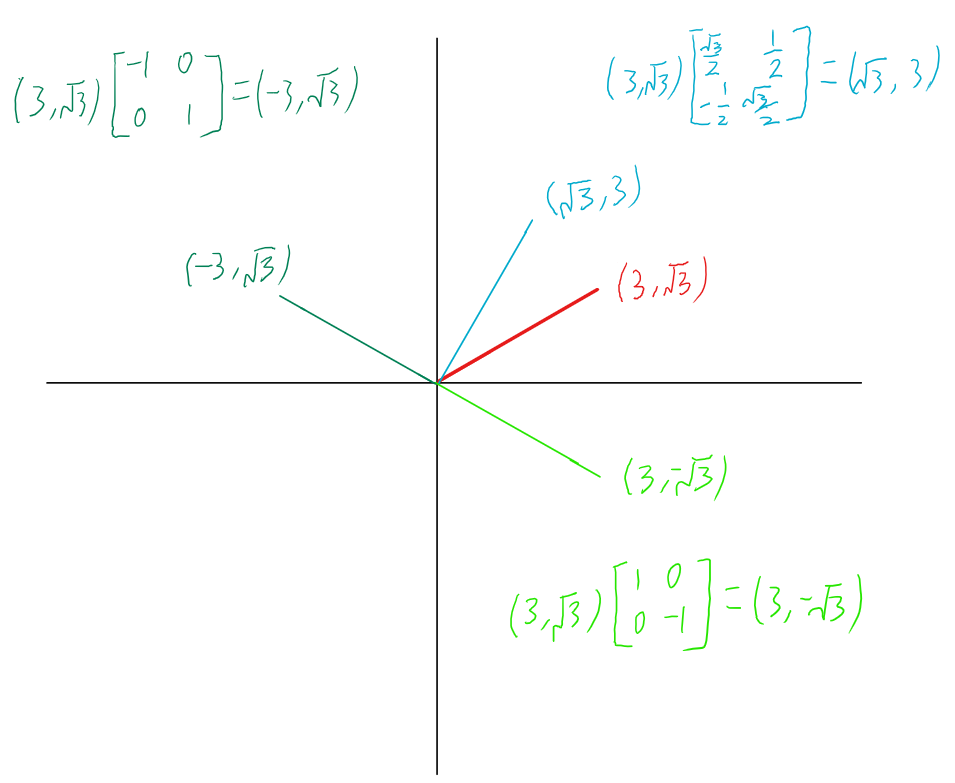
提示
记忆旋转变换
逆时针旋转: 第一象限一个向量, 逆时针旋转一个小角度, \(x\) 坐标减小, \(y\) 坐标增大
顺时针旋转: 第一象限一个向量, 逆时针旋转一个小角度, \(x\) 坐标增大, \(y\) 坐标减小
下面借助 Python 工具实现旋转变换的验证:
产生二维平面内椭圆内的随机点构成椭圆面 \(S\) ;
将椭圆面 \(S\) 分别进行逆时针与顺时针旋转;
绘制旋转前后的图像.
结果如下图
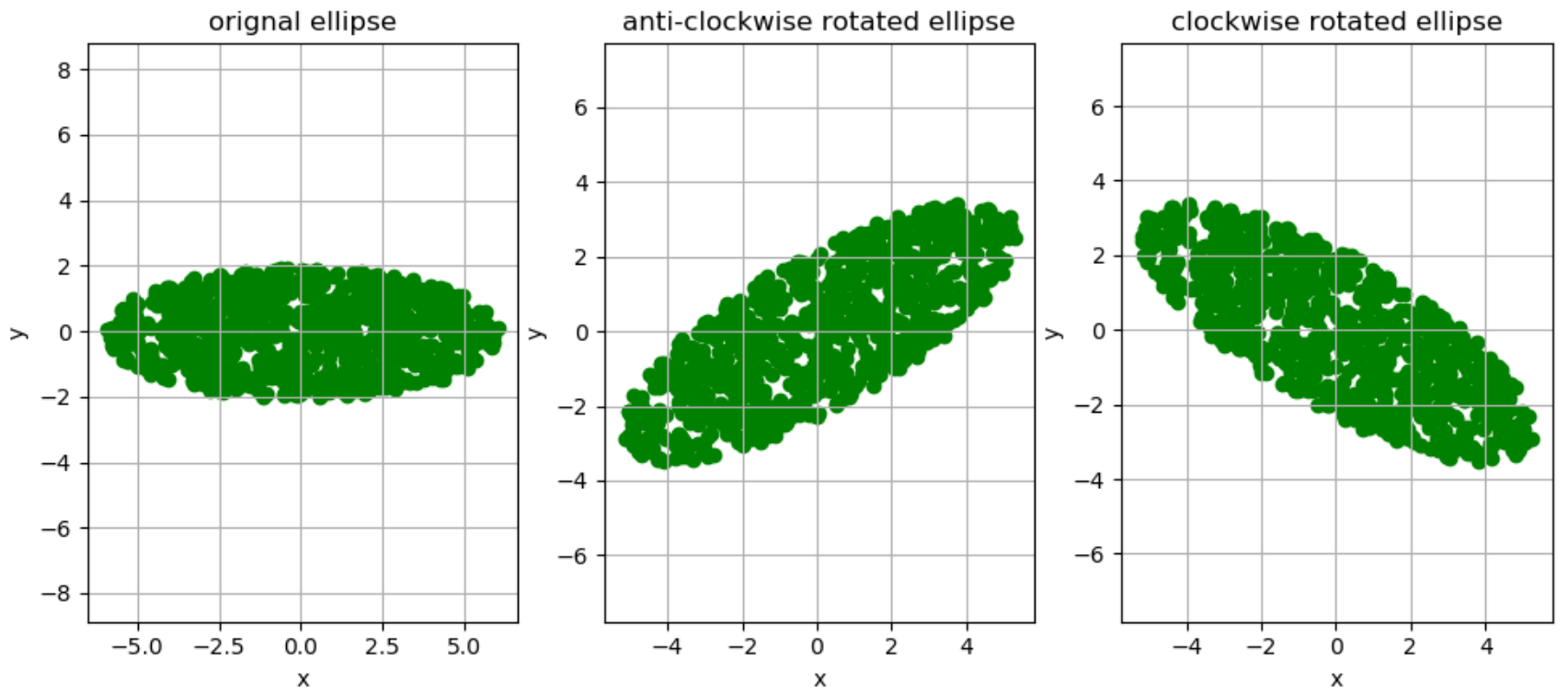
实现代码, 参见文件 demo_rotation_ellipse.py .
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 | import pytool
import numpy as np
import matplotlib.pyplot as plt
# =====================generate Ellipse=====================
a = 6 # major axis
b = 2 # minor axis
x0 = 10 # center x0
y0 = 10 # center y0
N = 1000 # number of points
# angle for rotating ellipse data
theta = np.pi * 30 / 180
x, y = pytool.ellipse_surface(a, b, x0, y0, N, 'rand')
x = x - np.mean(x)
y = y - np.mean(y)
xy = np.array([x, y])
print(xy.shape)
A = xy
# ========================rotate============================
# ------------rotating matrix(Anti-clockwise)------------
M1 = [[np.cos(theta), -np.sin(theta)],
[np.sin(theta), np.cos(theta)]]
print("M1", M1)
# -----------------------rotating--------
A1 = np.dot(M1, A)
x1 = A1[0]
y1 = A1[1]
# ------------rotating matrix(clockwise)-----------------
M2 = [[np.cos(theta), np.sin(theta)],
[-np.sin(theta), np.cos(theta)]]
print("M2", M2)
# -----------------------rotating--------
A2 = np.dot(M2, A)
x2 = A2[0]
y2 = A2[1]
# ========================show data=========================
xmin = np.min([x, x1, x2])
xmax = np.max([x, x1, x2])
ymin = np.min([y, y1, y2])
ymax = np.max([y, y1, y2])
plt.figure()
plt.subplot(131)
plt.scatter(x, y, c='g', marker='o')
plt.grid()
plt.axis([xmin, xmax, ymin, ymax])
# plt.axis('equal')
plt.xlabel('x')
plt.ylabel('y')
plt.title('orignal ellipse')
plt.subplot(132)
plt.scatter(x1, y1, c='g', marker='o')
plt.grid()
plt.axis([xmin, xmax, ymin, ymax])
# plt.axis('equal')
plt.xlabel('x')
plt.ylabel('y')
plt.title('anti-clockwise rotated ellipse')
plt.subplot(133)
plt.scatter(x2, y2, c='g', marker='o')
plt.grid()
plt.axis([xmin, xmax, ymin, ymax])
# plt.axis('equal')
plt.xlabel('x')
plt.ylabel('y')
plt.title('clockwise rotated ellipse')
plt.show()
|
1.3.4. 总结¶
线性变换对向量组相关性的影响 - 线性相关向量组 –> 线性变换 –> 线性相关 - 线性无关向量组 –> 线性变换 –> 线性无关或线性相关(如零变换)
线性变换 \(T\) 与其对应矩阵 \(A\) - 它们的值域、核、秩、亏相同