1.4. 特征值与特征向量¶
如何选择线性空间的基, 使得线性变换在该基下的矩阵表示最为简单. 涉及 特征值(eigenvalue) 与特征向量(eigenvector)
1.4.1. 特征值与特征向量¶
线性变换的特征值与特征向量¶
设 \(T\) 是数域 \({\mathbb K}\) 上的线性空间 \({\mathbb V}^n\) 上的线性变换, 且对于数域 \({\mathbb K}\) 中的数 \(\lambda\) , 若存在非零向量 \({\bm x} \in {\mathbb V}^n\) 满足如下条件
则称 \(\lambda\) 为 \(T\) 的 特征值 , \({\bm x}\) 为 \(T\) 的属于特征值 \(\lambda\) 的特征向量.
注解
由上述定义知:
线性变换不改变特征向量的方向
特征值被特征向量唯一确定, 特征向量不被特征值唯一确定( \(T(k{\bm x}) = k\lambda {\bm x}\) )
矩阵的特征值与特征向量¶
设有矩阵 \({\bm A}\) , 且对于数域 \({\mathbb K}\) 中的数 \(\lambda\) , 若存在非零向量 \({\bm x} \in {\mathbb V}^n\) 满足如下条件
则称 \(\lambda\) 为矩阵 \({\bm A}\) 的 特征值 , \({\bm x}\) 为 \({\bm A}\) 的属于特征值 \(\lambda\) 的特征向量.
特征值与特征向量的关系¶
注解
特征值被特征向量唯一确定, 特征向量不被特征值唯一确定( \(T(k{\bm x}) = k\lambda {\bm x}\) )
互不相同的特征值对应的特征向量线性无关
实例¶
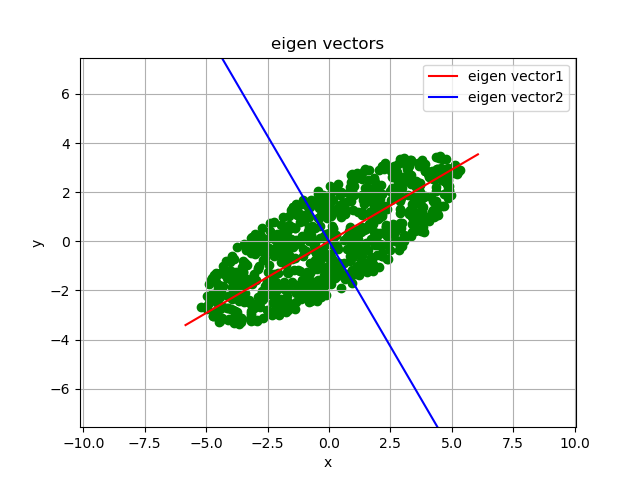
编程生成二维平面 \((x, y)\) 中的点, 这些点落在一个椭圆内, 长轴为 \(6\) , 短轴为 \(2\) , 如 图 1.5 所示, 其主要的方向有两个, 长轴方向(红色), 短轴方向(蓝).
对这些二维数据做主成分分析 ( Principal Component Analysis, PCA), 可得两个主要方向:
零均值化数据
计算数据的协方差(即两个维度间的)
计算协方差矩阵的特征值与特征向量
警告
注意这里是对数据的协方差矩阵作特征值分解, 是否可以不求协方差矩阵直接对原始数据矩阵进行分析得到主方向. 特征值特征向量是针对变换矩阵而言的, 对数据矩阵是否有相关理论.
实现代码, 参见文件 demo_eigen_ellipse.py .
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 | import pytool
import numpy as np
import matplotlib.pyplot as plt
# =====================generate Ellipse=====================
a = 6 # major axis
b = 2 # minor axis
x0 = 10 # center x0
y0 = 10 # center y0
N = 1000 # number of points
# angle for rotating ellipse data
theta = np.pi * 30 / 180
x, y = pytool.ellipse_surface(a, b, x0, y0, N, 'rand')
# x, y = pytool.ellipse_surface(a, b, x0, y0, N, 'order')
x = x - np.mean(x)
y = y - np.mean(y)
xse = [min(x), max(x)]
yse = [min(y), max(y)]
xy = np.array([x, y])
print(xy.shape)
A = xy
# ========================rotate============================
# ------------rotating matrix(Anti-clockwise)---------------
M = [[np.cos(theta), np.sin(theta)],
[-np.sin(theta), np.cos(theta)]]
M = [[np.cos(theta), -np.sin(theta)],
[np.sin(theta), np.cos(theta)]]
print("rotating matrix M: ", M)
# -----------------------rotating---------------------------
A = np.dot(M, A)
x = A[0]
y = A[1]
# ========================show data=========================
plt.figure()
plt.scatter(x, y, c='g', marker='o')
plt.grid()
# ==================Eigenvalue decomposition================
AAT = np.dot(A, A.transpose())
ATA = np.dot(A.transpose(), A)
evalues, evectors = np.linalg.eig(AAT)
# evalues, evectors = np.linalg.eig(ATA)
print(A.shape, AAT.shape, evalues.shape, evectors.shape)
print(AAT)
print("evalues: ", evalues, "evectors: ", evectors)
angle1 = np.arctan(evectors[1, 0] / evectors[0, 0]) * 180 / np.pi
angle2 = np.arctan(evectors[1, 1] / evectors[0, 1]) * 180 / np.pi
print(angle1, angle2)
# =====================plot eigen vector=====================
colorlines = ['-r', '-b']
pytool.plot_vectors2d(evectors.transpose(), xse=xse, yse=yse,
nPoints=N, title='eigen vectors', colorlines=colorlines)
plt.legend(['eigen vector1', 'eigen vector2'])
plt.show()
plt.figure()
plt.imshow(AAT)
plt.show()
|
1.4.2. 广义特征向量¶
概念与内涵¶
一般, 若 \(\lambda^*\) 是矩阵 \({\bm A}\) 的 \(k\) 重特征值, 则对应的线性无关的特征向量 \({\bm x}_1, {\bm x}_2, \cdots, {\bm x}_k\) 可由下列方程组求出
其中, \(i = 1, 2, \cdots, k\) , 且规定 \({\bm x}_0 = {\bm 0}\) , 将求得的 \(k\) 个向量 \({\bm x}_1, {\bm x}_2, \cdots, {\bm x}_k\) 称为矩阵 \({\bm A}\) 的 广义特征向量 .
计算步骤¶
写出特征多项式矩阵 \(\lambda {\bm I}-{\bm A}\)
令特征多项式矩阵对应的行列式的值为 \(|\lambda {\bm I}-{\bm A}| = 0\)
求解得特征值 \(\lambda\)
对于单重特征值: 代入方程组 \((\lambda {\bm I}-{\bm A}){\bm x} = {\bm 0}\) , 求解特征向量.
对于多重特征值: 代入方程组 \((\lambda^* {\bm I}-{\bm A}){\bm x}_i = - {\bm x}_{i-1}\) , 求解广义特征向量.
1.4.3. 例子(广义特征向量)¶
注解
求如下矩阵的特征值与特征向量/广义特征向量
解:
特征多项式矩阵为
可使用初等变换稍微化简, 方便求行列式的值 \(|\lambda {\bm I}-{\bm A}| = {{{(\lambda + 1)}^2}(\lambda - 4)}\)
求解 \(|\lambda {\bm I}-{\bm A}| = {{{(\lambda + 1)}^2}(\lambda - 4)} = 0\) 的解为 \(\lambda_1 = 4, \lambda_2 = \lambda_3 = -1\)
由 \((\lambda_1 {\bm I}-{\bm A}){\bm x}_1 = {\bm 0}\) 求解出对应于 \(\lambda_1\) 的特征向量 \({\bm x}_1 = (5, 6, 4)^T\) , 由 \((\lambda_2 {\bm I}-{\bm A}){\bm x}_2 = {\bm 0}\) , \((\lambda_3 {\bm I}-{\bm A}){\bm x}_3 = -{\bm x}_2\) 求解广义特征向量 \({\bm x}_2 = (0, 1, -1)^T\) , \({\bm x}_3 = (1, -1, 1/2)^T\)
1.4.4. 特征多项式与最小多项式¶
特征多项式¶
设 \(T\) 是 \({\mathbb V}^n\) 中的线性变换, \({\bm x}_1, {\bm x}_2, \cdots, {\bm x}_n\) 是线性空间 \({\mathbb V}^n\) 中的基, \(T\) 在该基下的矩阵为 \({\bm A}\) , 再设 \({\bm x} = {\xi}_1 {\bm x}_1 + {\xi}_2 {\bm x}_2 + \cdots + {\xi}_n {\bm x}_n\) 为 \(T\) 的属于特征值 \(\lambda\) 的特征向量, 则由 \(T{\bm x} = \lambda {\bm x}\) 知
从而有
由 \({\bm x} \neq {\bm 0}\) 知, \({\xi _1}, {\xi _2}, \cdots, {\xi _n}\) 不全为零, 从而方程组有非零解, 则
设有数域 \({\mathbb K}\) 上的 \(n\) 阶方阵 \({\bm A}\) , 变量 \(\lambda\) , 矩阵 \({\bm A}\) 的 特征矩阵 \(\lambda {\bm I} - {\bm A}\) 的行列式 \({\rm det}(\lambda {\bm I} - {\bm A})\) 称为矩阵 \({\bm A}\) 的 特征多项式 . 记为 \(\varphi (\lambda)\) , 其根 \(\lambda_i\) 为 \({\bm A}\) 的 特征值 , 非零解向量 :\(({\xi _1}, {\xi _2}, \cdots, {\xi _n})^T\) 为 \({\bm A}\) 的属于特征值 \(\lambda_i\) 的 特征向量 .
注解
线性变换 \(T\) 的特征值与特征向量, 与 \(T\) 的矩阵 \({\bm A}\) 的特征值与特征向量一一对应:
\(T\) 与 \({\bm A}\) 的特征值一致
\(T\) 的特征向量在基下的坐标与 \({\bm A}\) 的特征向量一致
线性变换 \(T\) 的矩阵 \({\bm A}\) 的特征多项式与基的选择无关
即, 若 \({\bm A}\) 为 \(T\) 在基 \({\bm x}_1, {\bm x}_2, \cdots, {\bm x}_n\) 下的矩阵, \(({\xi _1}, {\xi _2}, \cdots, {\xi _n})^T\) 为矩阵 \({\bm A}\) 的属于特征值 \(\lambda\) 的特征向量, 则
\(\lambda\) 是 \(T\) 的特征值
\({\bm x} = {\xi}_1 {\bm x}_1 + {\xi}_2 {\bm x}_2 + \cdots + {\xi}_n {\bm x}_n\) 是 \(T\) 的属于特征值 \(\lambda\) 的特征向量
线性变换 \(T\) 的矩阵 \({\bm A}\) 的特征多项式与基的选择无关
\(n\) 阶矩阵 \({\bm A}\) 是其特征多项式 \({\varphi}(\lambda)\) 的矩阵根. 即若有
则
最小多项式¶
定义: 首项系数是1, 次数最小, 且以矩阵 \({\bm A}\) 为根的 \(\lambda\) 的多项式, 称为 \({\bm A}\) 的 最小多项式 (MinimalPolynomial) , 常用 \(m(\lambda)\) 表示.
1.4.5. 特征子空间与不变子空间¶
什么是特征子空间¶
定义: 设 \(T\) 是线性空间 \({\mathbb V}^n\) 的线性变换, \(\lambda\) 是 \(T\) 的一个特征值, 称 \({\mathbb V}^n\) 的子空间 \({\mathbb V}^n_{\lambda}\) 是 \(T\) 的属于 \(\lambda\) 的 特征子空间 (Characteristic Subspace) , 其中
提示
特征子空间是线性子空间
特征子空间是由特征向量加上零向量构成的子空间.
什么是不变子空间¶
若 \(T\) 是线性空间 \({\mathbb V}\) 的线性变换, \({\mathbb V}_1\) 是 \({\mathbb V}\) 的子空间, 且 \(\forall {\bm x} \in {\mathbb V}_1\) , 有 \(T{\bm x} \in {\mathbb V}_1\) , 则称 \({\mathbb V}_1\) 是 \(T\) 的 不变子空间 (Invariant Subspace).
1.4.6. 信号子空间与噪声子空间¶
在数字信号处理领域经常定义 信号子空间 (Signal Subspace) 与 噪声子空间 (Noise Subspace)