4.1. SAR成像简介¶
注解
目前压缩感知重构算法分为两大类:
贪婪算法: 通过迭代选择合适的原子使得重构误差最小, 包括匹配追踪, 正交匹配追踪, 补空间匹配追踪等
凸优化: 通过放宽正则约束 (如 \(\ell_0\) –> \(\ell_1, \ell_2\) ) 转化为凸优化问题, 包括梯度投影法, 基追踪, 最小角回归
凸优化方法比贪婪算法所求解更为精确, 但计算复杂度高.
提示
压缩感知与正则化成像:
压缩感知强调压缩观测, 在信号不稀疏时先进行稀疏表示, 再求解
正则化方法强调通过加入先验, 使得问题有极小范数解
优化方法可以一致
4.1.1. 不同成像方法结果对比¶
仿真场景大小: \(32\times 32\)
回波矩阵大小: \(32\times 32\)
数据生成
通过模拟SAR成像过程生成SAR原始数据 \(\bf s\)
通过 \({\bf s} = {\bf A}{\bf g}\) 生成SAR原始数据 \(\bf s\)
成像方法
广义逆: \(\hat{\bf g} = {\bf A}^{+}{\bf s}\)
共轭转置: \(\hat{\bf g} = {\bf A}^H{\bf s}\)
距离多普勒方法: 匹配滤波, 距离徙动校正等.
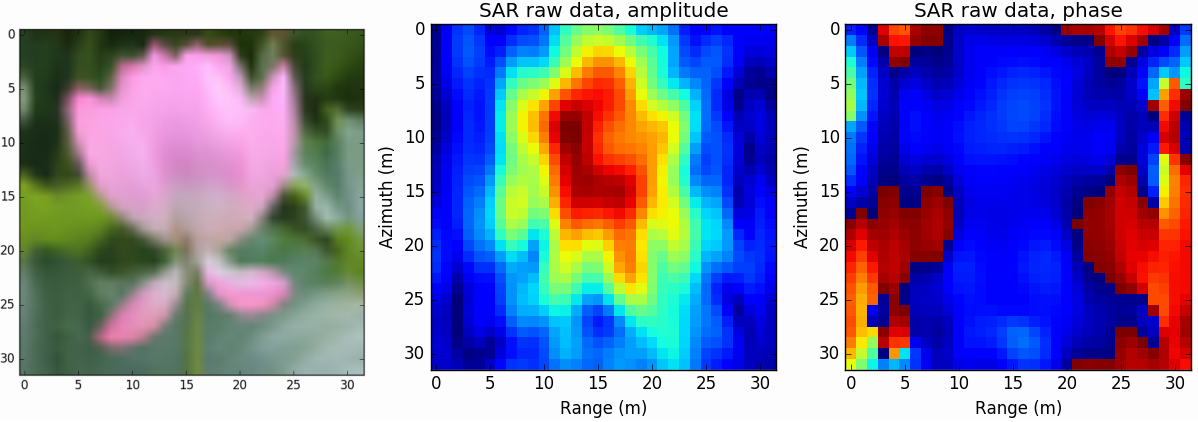
图 4.27 原始彩色荷花图(左)与仿真得到的SAR原始数据幅度(中)与相位(右).¶
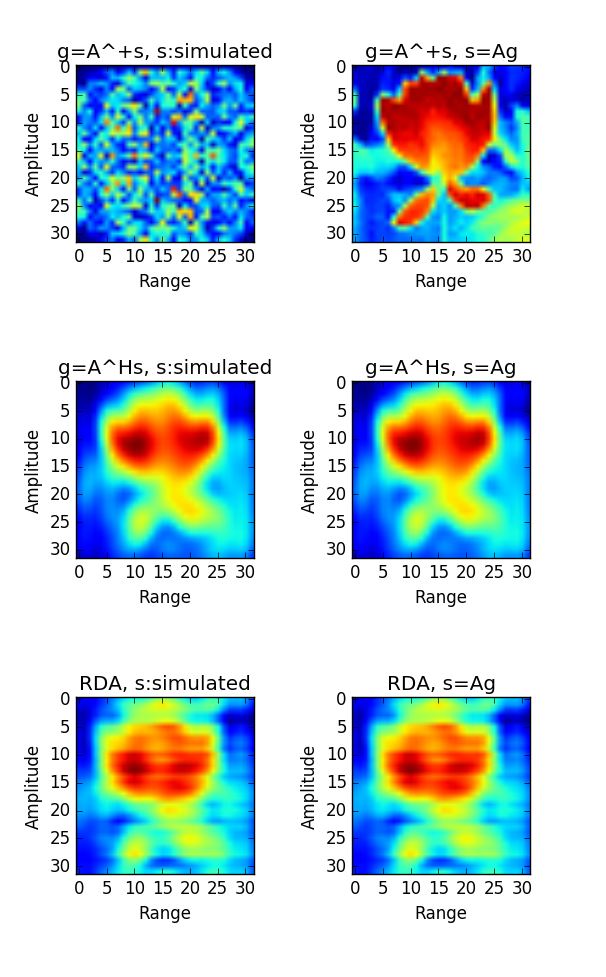
图 4.28 不同方法成像结果¶