4.5. 压缩感知成像¶
4.5.1. 压缩感知SAR成像¶
越来越多的基于压缩感知的SAR成像方法被提出 [3][4][5] .
匹配追踪用于量子模拟 [1]
SAR imaging process can be formulated as
where, \({\bm s}\) is the \(m = MN\times 1\) recieved SAR raw data vector in phase history domain, \(\bm g\) is the \(n = HW \times 1\) reflection vector of scene. \(\bm A\) represents the the mapping from scene to SAR raw data. \(\bm n\) is the noise vector.
If \(\bm g\) is not sparse enough, assume that exist a basis \({\bm D} = ({\bm d}_1, {\bm d}_2, \cdots, {\bm d}_n)\) that satisfies \({\bm g} = {\bm D}{\bm x}\) , where, \(\bm x\) is a \(K\) sparse \(n\times 1\) vector, and \(\bm D\) is the so called dictionary matrix of size \(n\times n\) .
Our goal is minimize
i.e.
where, \(\lambda\) is the balance factor, and \(|\cdot|_p, (0<p<1)\) is the \(\ell_p\) norm.
Let \({\bm \Phi} = {\bm A}{\bm D}\) , then we have
Note that, if \({\bm s, \Phi, x} \in {\mathbb C}\) , the problem changes to
so we have:
提示
对于非稀疏场景, 无需先对场景进行稀疏表示, 再进行观测; 然而在重构信号时, 由于信号非稀疏, 需要假设其在某一字典下稀疏.
ABC
4.5.2. 实验与分析¶
仿真数据¶
实验说明¶
仿真场景大小: \(32 \times 32\)
回波矩阵大小: \(32 \times 32\)
稀疏表示字典: 无,
DCT,DWT优化方法:
Lasso,OMP
仿真点目标场景图及仿真生成点SAR原始数据幅度与相位图如下:
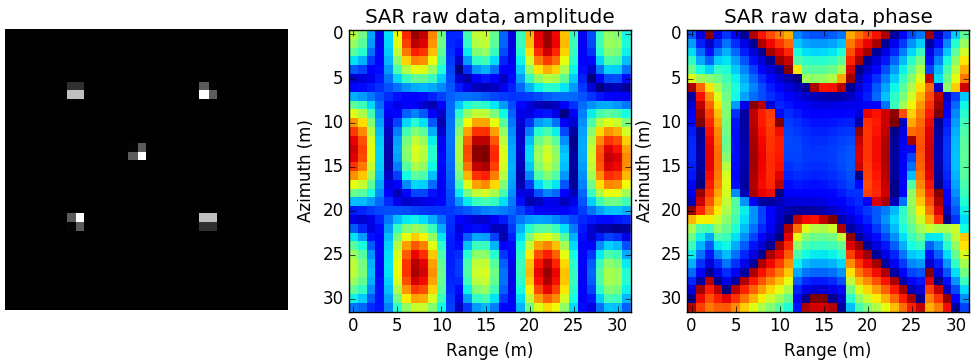
图 4.61 仿真点目标场景图, 仿真SAR原始数据幅度相位图¶
仿真船只场景图及仿真生成点SAR原始数据幅度与相位图如下:
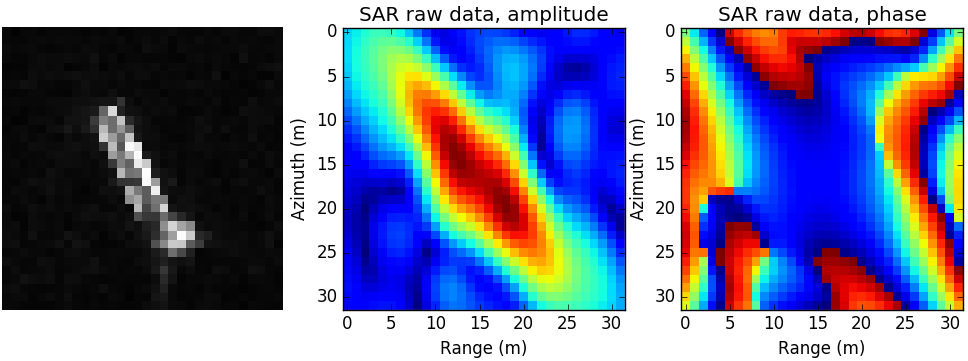
图 4.62 仿真船只场景图及仿真生成点SAR原始数据幅度与相位图如下¶
仿真荷花场景图及仿真生成点SAR原始数据幅度与相位图如下:

图 4.63 仿真荷花场景图及仿真生成点SAR原始数据幅度与相位图如下¶
实验代码¶
实验结果¶
1. OMP优化, 不采用字典进行稀疏表示, 和采用DCT字典进行稀疏表示的结果如下:
点目标结果

图 4.64 Compressive Sensing based and RDA Imaging Results of points.¶
船只结果:

图 4.65 Compressive Sensing based and RDA Imaging Results of ship.¶
荷花结果:

图 4.66 Compressive Sensing based and RDA Imaging Results of lotus.¶
2. Lasso优化, 不采用字典进行稀疏表示, 和采用DCT字典进行稀疏表示的结果如下:
点目标结果

图 4.67 Compressive Sensing based and RDA Imaging Results of points.¶
船只结果:

图 4.68 Compressive Sensing based and RDA Imaging Results of ship.¶
荷花结果:

图 4.69 Compressive Sensing based and RDA Imaging Results of lotus.¶
注解
由实验结果可知:
场景的稀疏性决定了重构的性能, 越稀疏重构越精确
字典的选择很重要