3.2. 距离与速度测量¶
3.2.1. 三角波测距与测速¶
频率调制连续波 (Frequency Modulated Continuous Wave, FMCW) 测距与测速, 发射一信号频率呈现三角波变化的调频连续波, 利用时延及多普勒效应实现测距与测速。其原理可由下图给出:
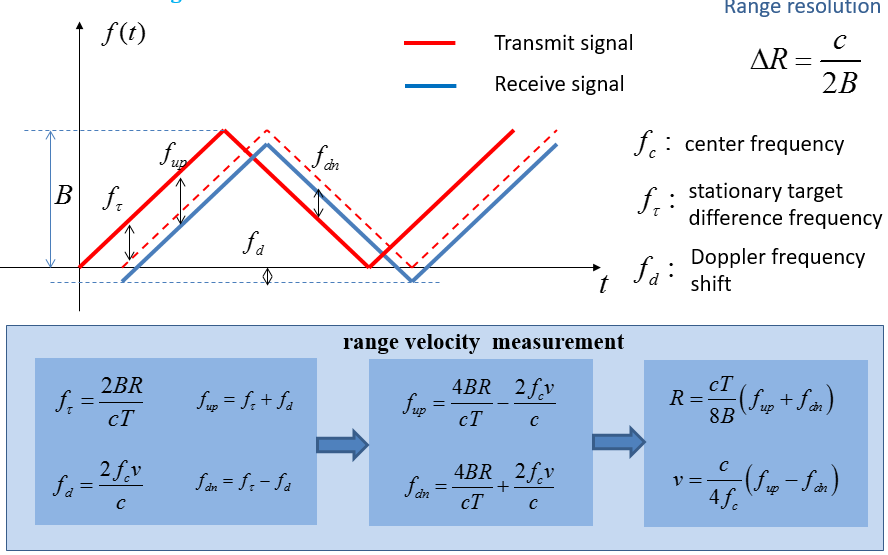
图 3.30 三角波测距与测速¶
其中:
\(c\) 为光速;
\(B\) 为调制带宽;
\(T_m\) 为调制周期;
\(R\) 为目标与雷达间的距离;
\(f_c\) 为载频;
\(f_{\tau}\) 为静止目标差频;
\(f_d\) 为运动目标产生的多普勒频移;
3.2.2. 锯齿波测距¶
锯齿波测距原理示意图如下:
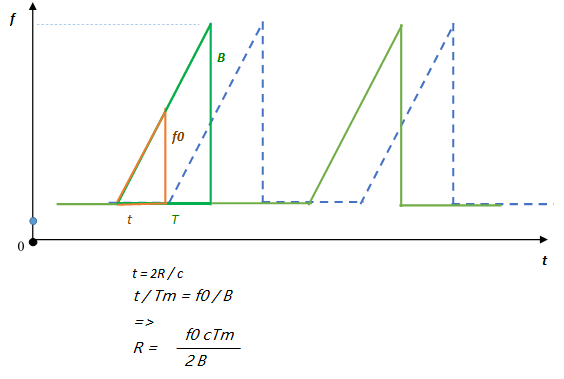
图 3.31 锯齿波测距¶
其中:
\(f_0\) 为目标静止时的差频;
\(f_d\) 为多普勒差频, 可通过FFT获得;
\(B\) 为调制带宽;
\(T_m\) 为调制周期;
\(c\) 为光速;
\(R\) 为距离;
\(v\) 为速度;