3.3. 角度测量¶
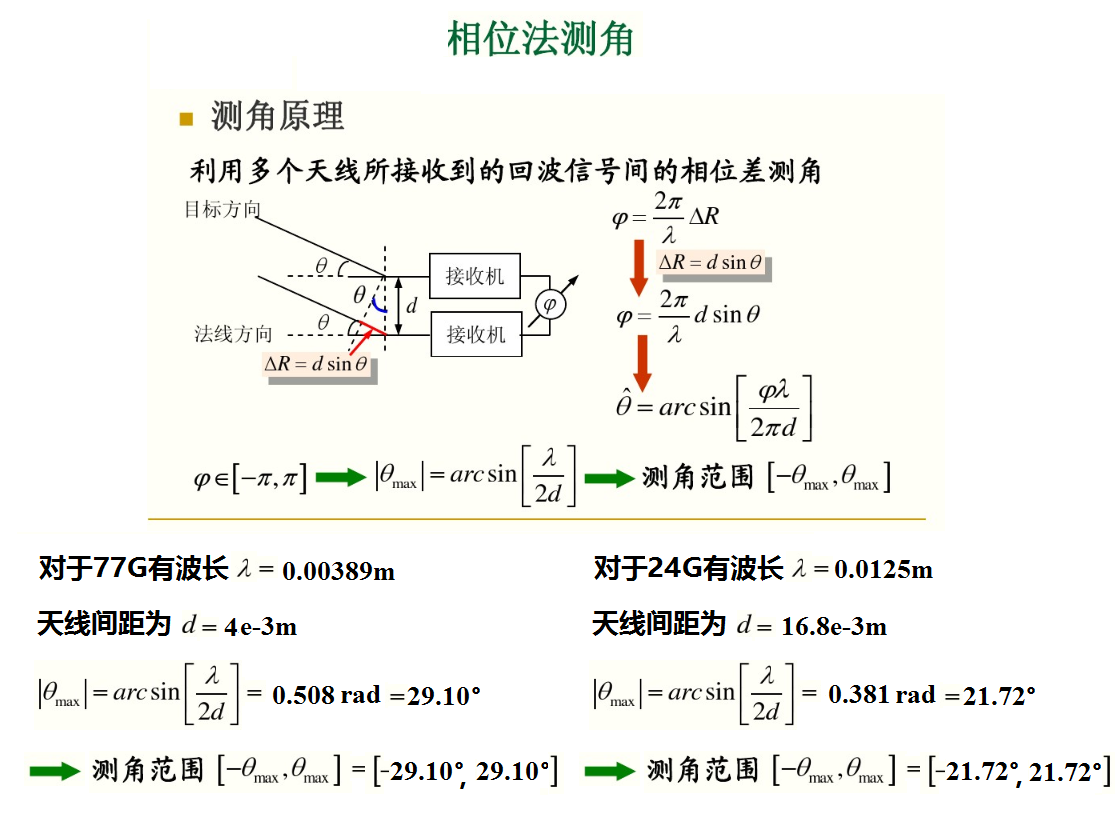
相位法
振幅法
3.3.1. 简介¶
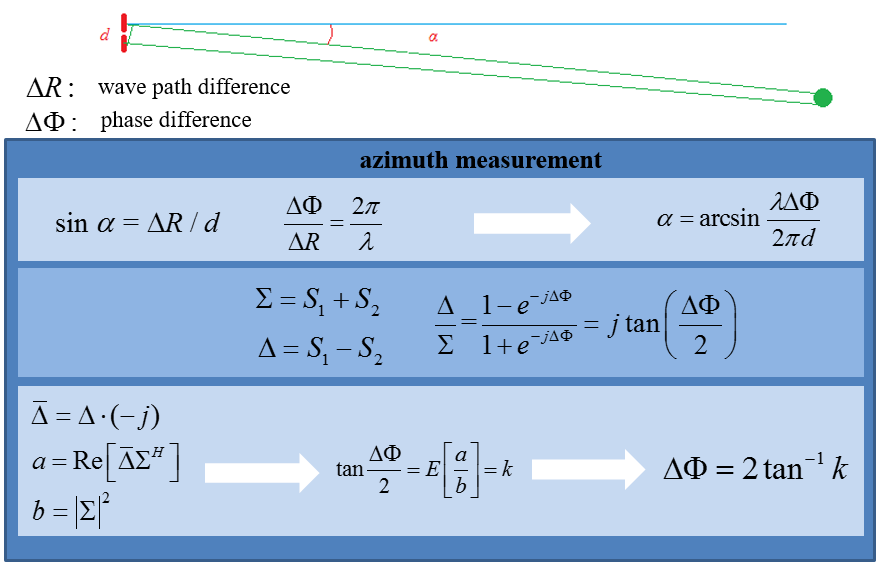
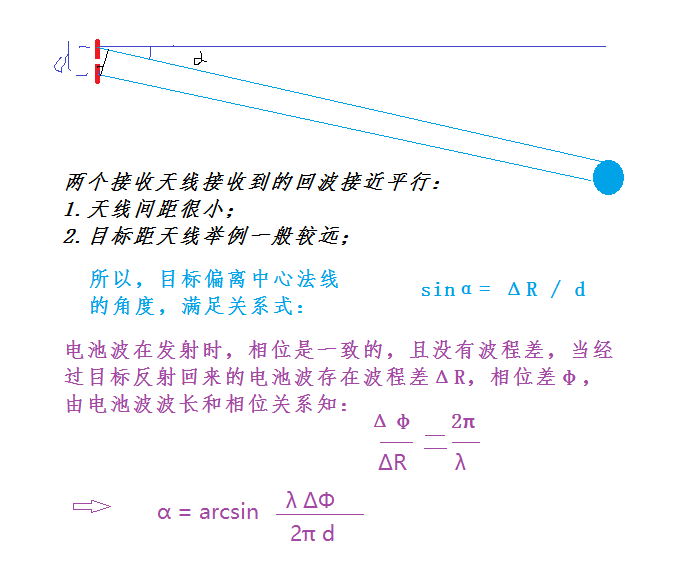
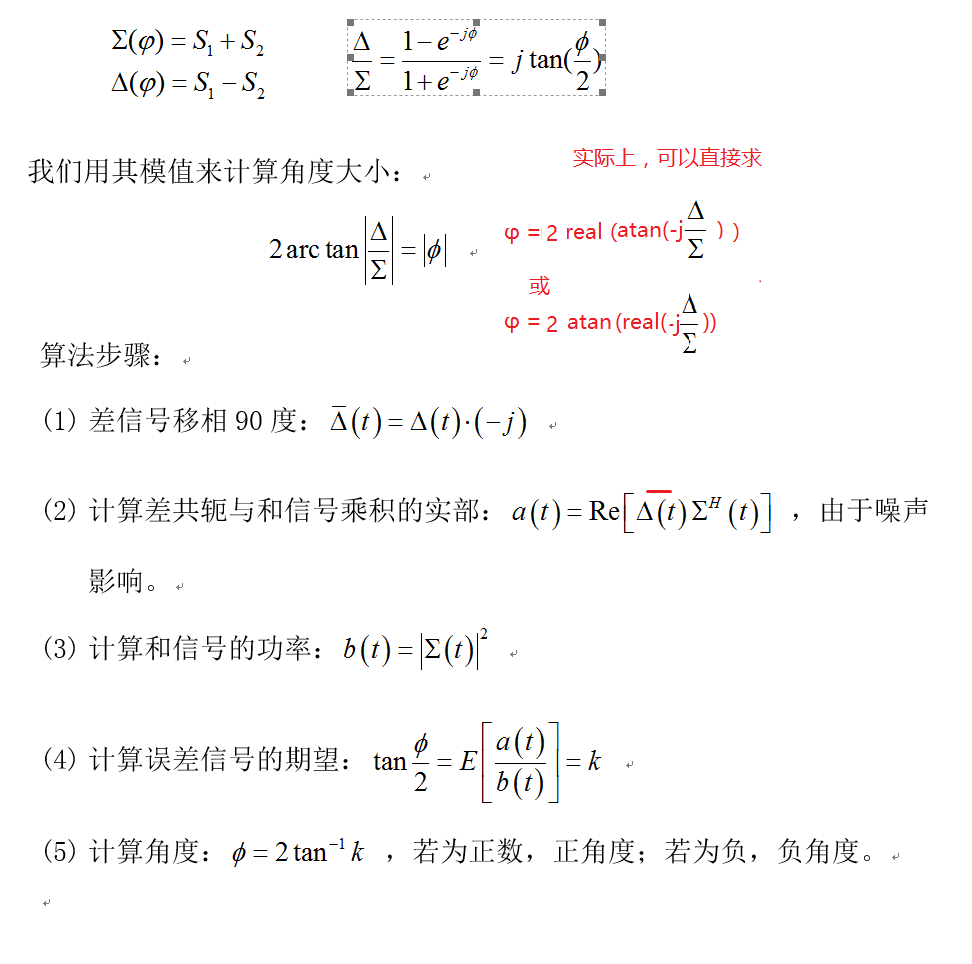
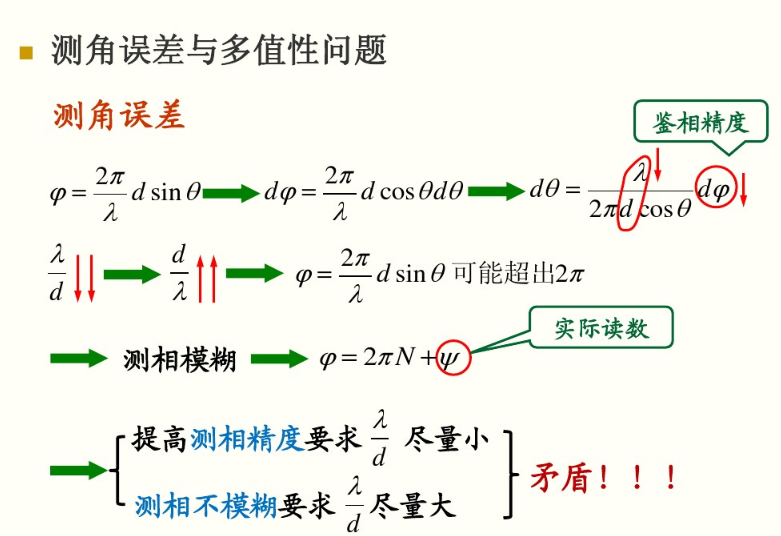
角度测量是探测 “目标——天线中心线的连线” 与法线的夹角,多用于目标定位。设计有一根发射天线 TX,两根接收天线 RX1/RX2,并有 I1、I2、Q1、Q2 四个工作通道,采用比相法来实现此功能。
参考文档:[雷达原理角度测量](https://wenku.baidu.com/view/d44192cee45c3b3567ec8bb7.html)
相位法
振幅法
角度测量是探测 “目标——天线中心线的连线” 与法线的夹角,多用于目标定位。设计有一根发射天线 TX,两根接收天线 RX1/RX2,并有 I1、I2、Q1、Q2 四个工作通道,采用比相法来实现此功能。
参考文档:[雷达原理角度测量](https://wenku.baidu.com/view/d44192cee45c3b3567ec8bb7.html)