1.10. UAVSAR 产品介绍¶
1.10.1. UAVSAR 简介¶
UAVSAR (Uninhabited/Unmanned Aerial Vehicle Synthetic Aperture Radar) 是由美国国家航空和航天局 (National Aeronautics and Space Administration, NASA) 的喷气推进实验室(Jet Propulsion Laboratory, JPL)设计和建造的一种无人驾驶飞行器合成孔径雷达, 属于机载合成孔径雷达的一种, 专门被设计用于获取机载重复轨道SAR数据, 从而用于差分干涉测量. UAVSAR 于2007年8月发射, 服役至今(2020年). 有关 UAVSAR 的信息可在 这里 和 这里 查看, 从 ASF 和 JPL 上均可以下载 UAVSAR 产品数据.
PolSAR: MLC, Compressed Stokes Matrix, Ground Projected Complex, Pauli Decomposition
RPI: Interferogram, Ground Projected Interferogram, Amplitude, Ground Projected Amplitude
1.10.2. 数据读取¶
多视数据¶
多视数据文件后缀名为 .mlc, 其中为数据的二进制值, 每个浮点数占4字节, 按行顺序存储, 若为复数数据, 则按实部虚部的顺序存储, 在MATLAB中可以使用如下代码读取:
im_size = [3185, 5843];
im_size_c = im_size.*[2,1];
% for real floating-point data
fid = fopen(filename, 'rb');
X = fread(fid,im_size,'real*4=>single');
fclose(fid);
% for complex floating-point data
fid = fopen(filename, 'rb');
X = fread(fid,im_size_c,'real*4=>single');
X = X(1:2:end, :) + 1j*X(2:2:end, :);
fclose(fid);
以 Salt Lake City 的区域为例, 如 图 1.40 所示, 从ASF上可查询到 Salt Lake City 区域的两景数据, 选择数据 stlake_27129_20002_008_200131_L090_CX_01_mlc.zip 下载, 对应 图 1.40 中的红色框, 读取后显示得到 图 1.41 所示结果, 对比 图 1.40 和 图 1.41, 可知数据读取正确.
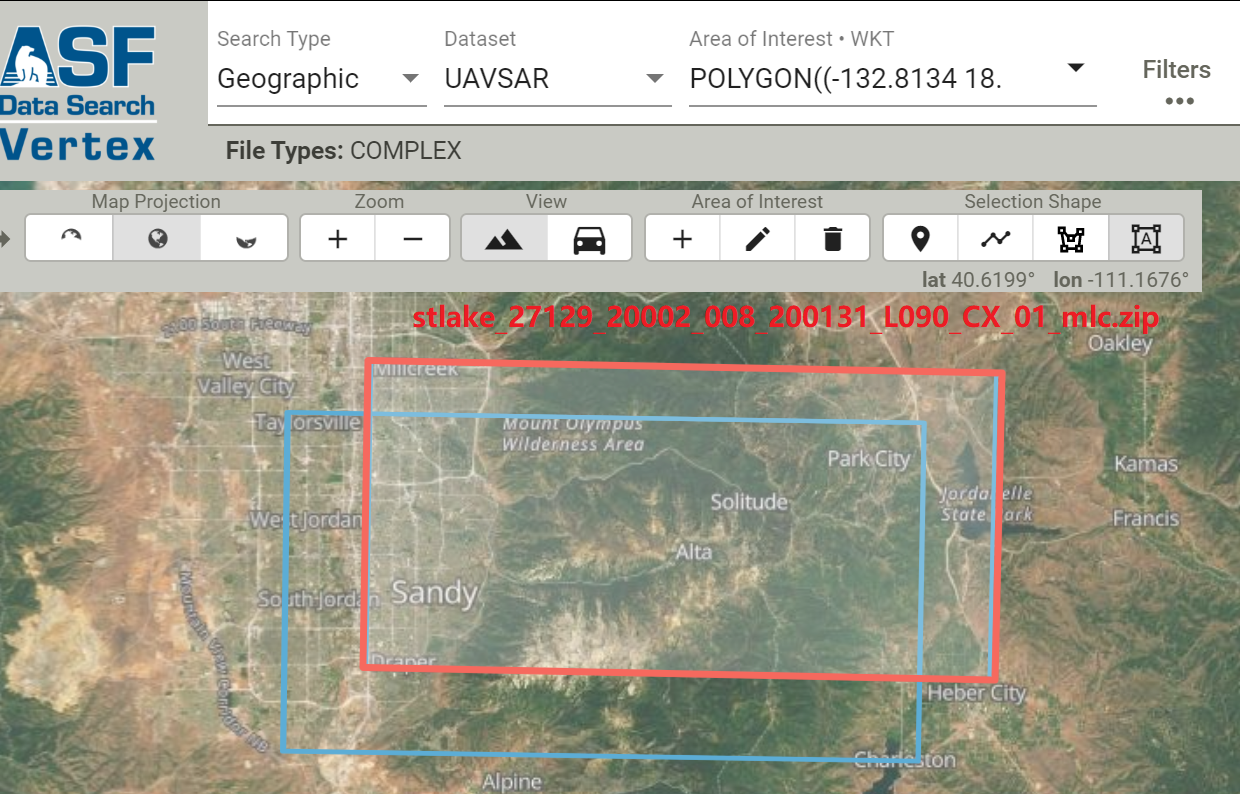
图 1.40 Search UAVSAR data¶
需要注意的是, 原始数据大小为 \(3185×5843\), 图 1.41 所示结果被降采样至 \(1366×744\). 此外, 由于飞机自西向东飞行, 成像后的数据进行水平翻转后才能与实际区域相吻合.

图 1.41 Visualization of data stlake_27129_20002_008_200131_L090HHHV_CX_01¶